-
×
 Boson _ Motion Sensor 動作感測器
1 × NT$ 340
Boson _ Motion Sensor 動作感測器
1 × NT$ 340 -
×
 輪胎-TYRE FOR WEDGE-BELT WHEEL
1 × NT$ 20
輪胎-TYRE FOR WEDGE-BELT WHEEL
1 × NT$ 20 -
×
 Seeed Studio XIAO SAMD21 (預焊針腳)
1 × NT$ 260
Seeed Studio XIAO SAMD21 (預焊針腳)
1 × NT$ 260 -
×
 電源線 Type-C公接頭轉DC 5.5/2.1mm公接頭
1 × NT$ 100
電源線 Type-C公接頭轉DC 5.5/2.1mm公接頭
1 × NT$ 100 -
×
 Grove_塵埃感測器Dust Sensor
1 × NT$ 300
Grove_塵埃感測器Dust Sensor
1 × NT$ 300 -
×
 TCRT 5000避障紅外線模組
1 × NT$ 50
TCRT 5000避障紅外線模組
1 × NT$ 50 -
×
 插銷-CONNECTOR PEG W. FRICTION
1 × NT$ 1
插銷-CONNECTOR PEG W. FRICTION
1 × NT$ 1 -
×
 Gravity: 類比式總溶解固體(TDS)感測器 Analog TDS Sensor/Meter for Arduino
1 × NT$ 380
Gravity: 類比式總溶解固體(TDS)感測器 Analog TDS Sensor/Meter for Arduino
1 × NT$ 380 -
×
 Grove - 線性可變電阻 Slide Potentiometer
1 × NT$ 160
Grove - 線性可變電阻 Slide Potentiometer
1 × NT$ 160 -
×
 齒輪-Gear 20 Tooth Bevel with Pin Hole
1 × NT$ 10
齒輪-Gear 20 Tooth Bevel with Pin Hole
1 × NT$ 10 -
×
 LattePanda拿鐵熊貓基本配件組LattePanda Starter Kit
1 × NT$ 1,000
LattePanda拿鐵熊貓基本配件組LattePanda Starter Kit
1 × NT$ 1,000 -
×
 4010藍光散熱風扇 適用於NVIDIA® Jetson Nano™ 2GB 或樹莓派
1 × NT$ 75
4010藍光散熱風扇 適用於NVIDIA® Jetson Nano™ 2GB 或樹莓派
1 × NT$ 75 -
×
 4020 PWM 散熱風扇 適用於NVIDIA® Jetson Nano™ 開發套件或是reComputer J1010
1 × NT$ 150
4020 PWM 散熱風扇 適用於NVIDIA® Jetson Nano™ 開發套件或是reComputer J1010
1 × NT$ 150 -
×
 土壤監測感測器 溫度、濕度(RS485)
1 × NT$ 1,000
土壤監測感測器 溫度、濕度(RS485)
1 × NT$ 1,000 -
×
 科易KEYES HT16K33 8X8 陣列 LED矩陣式顯示模組
1 × NT$ 180
科易KEYES HT16K33 8X8 陣列 LED矩陣式顯示模組
1 × NT$ 180 -
×
 輪框-RIM WIDE 18/14 W. HOLE Ø4.8
1 × NT$ 8
輪框-RIM WIDE 18/14 W. HOLE Ø4.8
1 × NT$ 8 -
×
 micro USB線(含開關 40CM)
1 × NT$ 40
micro USB線(含開關 40CM)
1 × NT$ 40 -
×
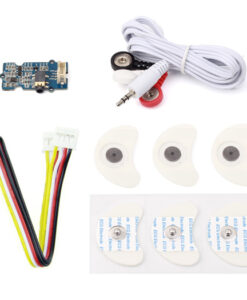 Grove - 肌電圖感測器 EMG Detector
1 × NT$ 1,380
Grove - 肌電圖感測器 EMG Detector
1 × NT$ 1,380 -
×
 輪框-WEDGE-BELT WHEEL Ø24
1 × NT$ 13
輪框-WEDGE-BELT WHEEL Ø24
1 × NT$ 13 -
×
 科技類凸點橫桿-TECHNIC BRICK 1X6, Ø4,9 Yellow
1 × NT$ 5
科技類凸點橫桿-TECHNIC BRICK 1X6, Ø4,9 Yellow
1 × NT$ 5 -
×
 明緯HDR-100-24N 軌道式(DIN Rail)電源供應器24V4.2A 100.8W
1 × NT$ 840
明緯HDR-100-24N 軌道式(DIN Rail)電源供應器24V4.2A 100.8W
1 × NT$ 840 -
×
 其他-Power Joint with Ball
1 × NT$ 175
其他-Power Joint with Ball
1 × NT$ 175

微雪 DTOF雷射光學雷達感測器STL27L
NT$ 5,600
2 件庫存
STL-27L 測距核心採用 DTOF 技術,可進行每秒 21600 次的測距。每次測距時,雷達發射出紅外雷射,雷射遇到目標物體後被反射到單光子接收單元。由此,我們獲取到了雷射的發出時間和單光子接收單元收到雷射的時間,兩者的時間差即光的飛行時間,飛行時間再結合光速即可解算出距離。獲取到距離資料後,會融合角度測量單元測量到的角度值組成點雲資料,然後內部通過無線通訊將點雲資料發送到外部介面。
規格
測距範圍:
- 0.03 ~ 25m 80%反射率的白靶上測試
- 0.03~10m 4%反射率的黑靶上測試
測距精準度:
- ±15mm@0.03m-2m, STD 5mm
- ±20mm@2m-8m, STD 15mm;
- ±30mm@>8m, STD 25mm
掃描頻率:6Hz~13Hz (默認10Hz)
測距頻率:21600 Hz
俯仰角誤差:0.5°~2°
偏航角誤差:-1°~1°
抗環境光:60Lux (陽光內部測試標準)
鐳射波長:895nm~905nm(典型值905nm)
通信介面:UART @ 921600
輸入電壓:4.5v~5.5v
工作電流:≤290mA
工作溫度範圍:-10℃~50℃
PWM控制頻率:20kHz~50kHz
PWM占空比:40%~100%
整機尺寸:54.00 x 46.29 x 34.80 mm(長寬高)
重量:46g
工作電壓:5.5V
使用壽命:10000h

出貨清單:
- STL27L × 1
- LiDAR Driver with ESP8266 轉接板 × 1
- USB 線 Type A 公 轉 Type C 公 約1米 × 1
- ph2.0 轉 1.27H 4P 約 11cm × 1

原廠說明與範例:
相關商品

樂高LEGO®零件
NT$ 2

樂高LEGO®零件
NT$ 25

樂高LEGO®零件
NT$ 1

樂高LEGO®零件
NT$ 1

樂高LEGO®零件
NT$ 4