使用最佳化版本SO-ARM101建立您自己的模仿學習機械手臂!這些套件專為 LeRobot 和 Hugging Face 專案設計,包括伺服馬達、控制板和訊號線。開源、低成本、適合 DIY——非常適合機器人愛好者和開發人員。立即利用我們全面的資源開始製作原型!請注意,本套件不包括 3D 列印零件。
新功能:
- 佈線最佳化:與 SO-ARM100 相比,SO-ARM101 的佈線經過改進,避免先前在關節處斷開的問題,新的佈線設計也不再限制關節的活動範圍。
- 引導臂的不同齒輪比:引導臂現在使用具有最佳化齒輪比的電機,從而提高了性能並且不再需要外部齒輪箱。
- 新的功能支援:引導臂現在可以即時跟隨跟隨臂,這對於即將推出的強化學習 (RL) 策略至關重要,在該策略中,人類可以介入和糾正機器人的行為。
特色:
- 開源低成本:是來自TheRobotStudio的開源、低成本的機械手臂解決方案。
- 與 LeRobot 整合:專為與 LeRobot 整合而設計,它為現實世界的機器人應用(包括資料收集、模擬、訓練和部署)提供用於強化學習和模仿學習的 PyTorch 模型、資料集和工具。
- 豐富的學習資源:提供全面的開源學習資源,如組裝和校準指南,以及測試、資料收集、訓練和部署的教程,幫助使用者快速入門和開發機器人應用程式。
- 與 Nvidia 相容:使用 reComputer J4012 Orin NX 16 GB 部署此機械臂套件。
模仿學習與強化學習
LeRobot框架與SO-ARM10x機械手臂相容。它為機械手臂的教學提供了完整的資料收集、訓練和部署,並且還擁有全面的模擬平台。在Nvidia Jetson邊緣設備上,可以輕鬆快速地訓練客製化的機械手臂完成抓取和放置任務。詳細教學請參考:LeRobot – NVIDIA Jetson AI Lab
此套件包括 3D 列印零件。

出貨清單:
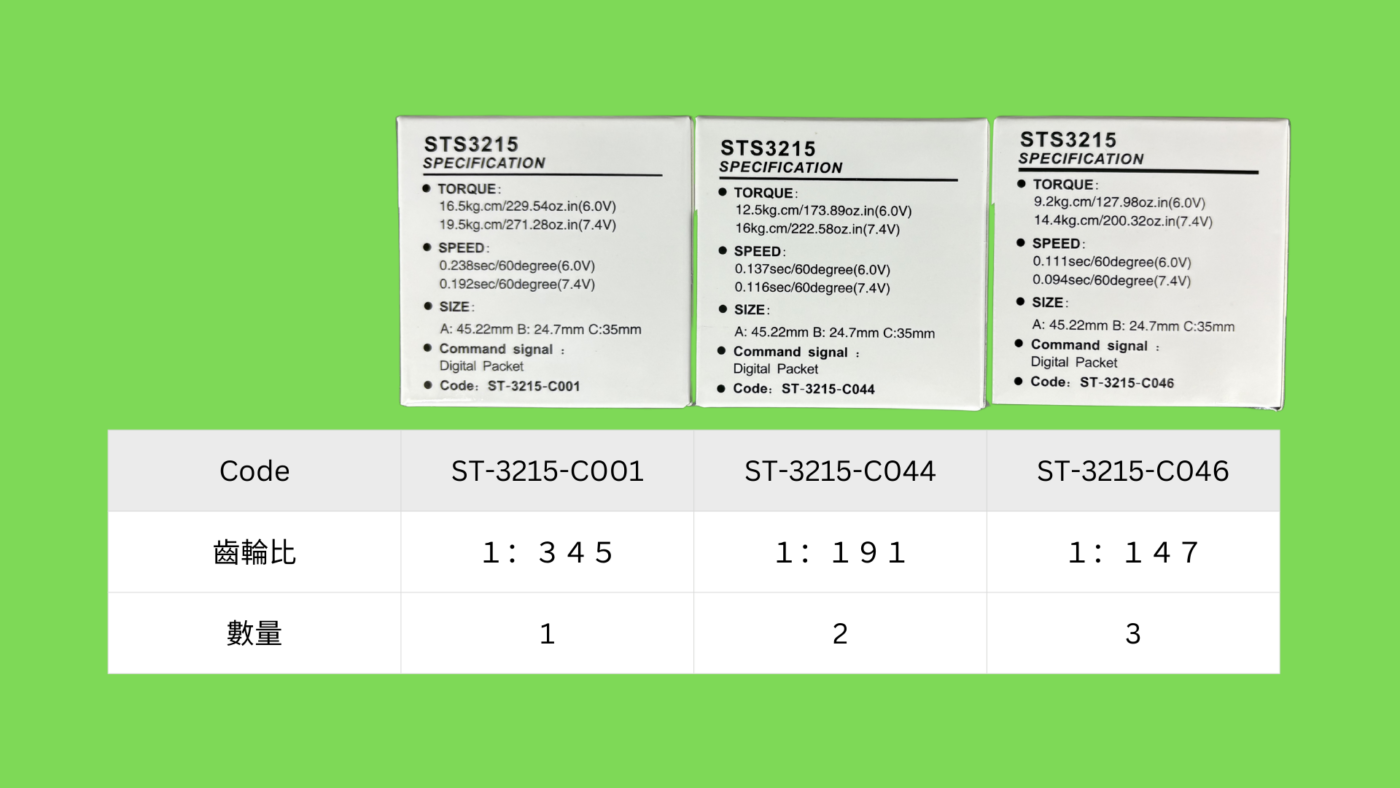
- 7.4V STS3215-C001 伺服機 齒輪比1:345(含螺絲) x1
- 7.4V STS3215-C044 伺服機 齒輪比1:191(含螺絲) x2
- 7.4V STS3215-C046 伺服機 齒輪比1:147(含螺絲) x3
- 12V STS3215-C018 伺服機 齒輪比1:345(含螺絲) x6
- 伺服控制板 for Seeed Studio XIAO x2
- 5V電源供應器 x1
- 12V電源供應器 x1
- USB-C 傳輸線 x2
- 直流電源線 x2
- 3D列印零件(顏色隨機搭配)
- 木工夾x4
相關連結:
NVIDIA Jetson AI Lab about Lerobot
https://www.jetson-ai-lab.com/lerobot.html
組裝說明影片
https://www.youtube.com/watch?v=FioA2oeFZ5I
How to use the SO-ARM100 and SO-ARM101 robotic arm in Lerobot(seeed版)
https://wiki.seeedstudio.com/lerobot_so100m/
SO-ARM101 github文件
https://github.com/TheRobotStudio/SO-ARM100
Datasheet 伺服控制板 for Seeed Studio XIAO
https://files.seeedstudio.com/wiki/reComputer-Jetson/lerobot/bus_servo_xiao.pdf
相關商品


Xavier系列

RealSense