-
×
 Grove - 紅外線接收器Infrared Receiver v1.2
1 × NT$ 150
Grove - 紅外線接收器Infrared Receiver v1.2
1 × NT$ 150 -
×
 Grove-LED燈條 LED Bar v2.0
1 × NT$ 150
Grove-LED燈條 LED Bar v2.0
1 × NT$ 150 -
×
 其他-Power Joint with Ball
1 × NT$ 175
其他-Power Joint with Ball
1 × NT$ 175 -
×
 輪框-RIM WIDE 18/14 W. CROSS Ø4.8
2 × NT$ 8
輪框-RIM WIDE 18/14 W. CROSS Ø4.8
2 × NT$ 8 -
×
 G7 PMS7003 雷射PM2.5粉塵感測器 附轉接板
1 × NT$ 740
G7 PMS7003 雷射PM2.5粉塵感測器 附轉接板
1 × NT$ 740 -
×
 Grove - 蜂鳴器Buzzer
1 × NT$ 52
Grove - 蜂鳴器Buzzer
1 × NT$ 52 -
×
 齒輪-DOUBLE CONICAL WHEEL Z36
1 × NT$ 45
齒輪-DOUBLE CONICAL WHEEL Z36
1 × NT$ 45 -
×
 輪胎-TYRE NORMAL WIDE Ø43,2 X 22
1 × NT$ 42
輪胎-TYRE NORMAL WIDE Ø43,2 X 22
1 × NT$ 42 -
×
 連接器-CROSS BLOK 3M
1 × NT$ 6
連接器-CROSS BLOK 3M
1 × NT$ 6 -
×
 輪胎-TYRE FOR WEDGE-BELT WHEEL
1 × NT$ 20
輪胎-TYRE FOR WEDGE-BELT WHEEL
1 × NT$ 20 -
×
 輪胎-Tyre Low Wide Ø68.8 X 36
1 × NT$ 120
輪胎-Tyre Low Wide Ø68.8 X 36
1 × NT$ 120 -
×
 Grove_塵埃感測器Dust Sensor
1 × NT$ 300
Grove_塵埃感測器Dust Sensor
1 × NT$ 300 -
×
 齒輪-DOUBLE CONICAL WHEEL Z20 1M
1 × NT$ 12
齒輪-DOUBLE CONICAL WHEEL Z20 1M
1 × NT$ 12 -
×
 齒輪-DOUBLE CONICAL WHEEL Z12 1M
1 × NT$ 3
齒輪-DOUBLE CONICAL WHEEL Z12 1M
1 × NT$ 3

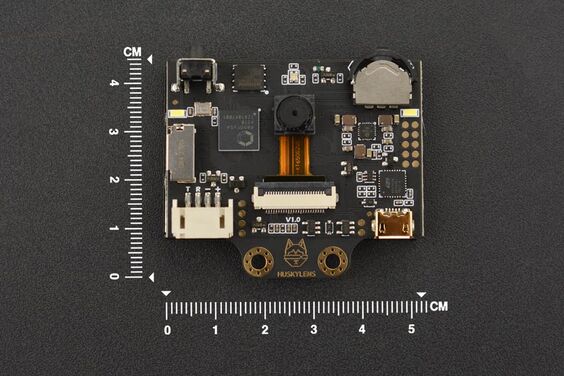




【現貨】DFROBOT HUSKYLENS PRO 伍佰萬像素 哈士奇AI辨識鏡頭


NT$ 2,200
2 件庫存
規格說明:
處理器:Kendryte K210
影像感應器:OV5640 (5.0Megapixel Camera)
支援電壓:3.3~5.0V
耗電量 (TYP):320mA@3.3V, 230mA@5.0V (face recognition mode; 80% backlight brightness; fill light off)
連接介面:UART, I2C
顯示螢幕:2.0-inch IPS screen with 320*240 resolution
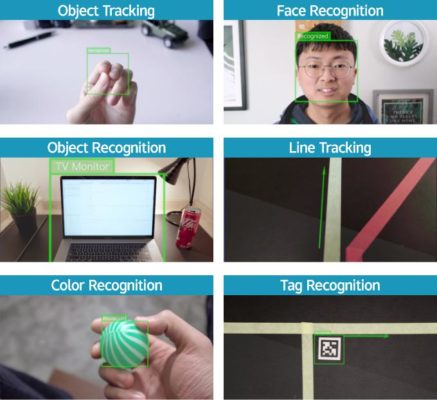
內建演算法:臉孔辨識Face Recognition、物件追蹤 Object Tracking、物件識別Object Recognition、循線Line Tracking、顏色識別Color Recognition、標籤識別Tag Recognition
尺寸:52mm * 44.5mm / 2.05 x 1.75inch
說明文件按這裡:
DFROBOT wiki
出貨清單:
HuskyLens主板 x1
M3 螺絲 x6
M3 螺帽 x6
Small Mounting Bracket x1
Heightening Bracket x1
Gravity 4-Pin訊號線 x1
相關商品


Wio Terminal
NT$ 2,400
特價


Wio Terminal
原始價格:NT$ 1,300。NT$ 1,150目前價格:NT$ 1,150。

已售完
Raspberry Pi 5
NT$ 1,000
學習套件&材料包
NT$ 3,000


深度影像攝影機StereoLab-ZED
NT$ 25,660