
【現貨】RealSense™ 景深攝影機 D435if(具IMU與紅外線濾鏡)精裝版


NT$ 15,040
允許無庫存下單
在 D435f 相機上添加了 IMU,使應用程式能夠在相機移動的任何情況下改善深度感知。 D435if 擁有我們最寬的視野,並配備全域快門和 IMU,適用於高速深度應用。鏡頭上新增的紅外線濾光片可解決因光反射而導致的重複圖案和錯誤物體偵測問題。
RealSense™ 景深攝影機D435 結合了Intel D4視覺處理器和景深模組,能使用立體視覺計算景深。體積小且支援跨平台且開放原始程式碼的 RealSense™ SDK 2.0,能電腦或是嵌入式開發板等不同平台上使用。
D435if = D435 加上 CLAREX® NIR-75N 近紅外線濾光片,該濾光片應用於覆蓋玻璃上,但在投影器與 RGB 感測器的位置保留開孔。此濾光片可透過近紅外線光線,並吸收可見光。濾光片的厚度為 0.5 mm。
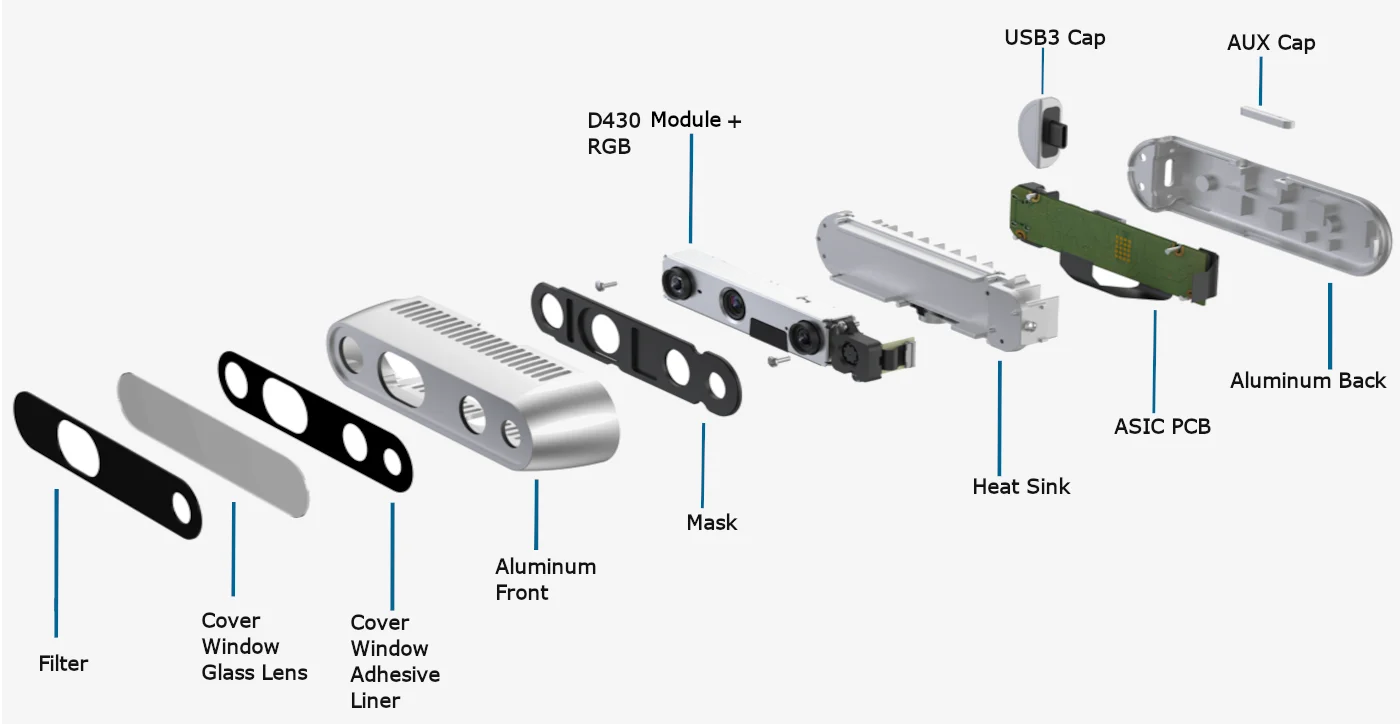
圖片來源:https://realsenseai.com/stereo-depth-with-ir-pass-filter/d435if/
作業規格
- 操作範圍 (下限-上限):0.3m-3m
- 全域快門 Global Shutter
- 深度解析和 FPS:1280×720 30fps
- 深度景深:H:87° V:58°
- 深度幀率:最高至90fps
- RGB解析度:1920 × 1080
- RGB Sensor Technology:Rolling Shutter
- RGB幀速率:30fps
- RGB 感測器視野(水平 x 垂直):69° × 42°
模組規格
- 尺寸:90 mm x 25 mm x 25.8 mm
- 系統介面類型:USB 3.1 Type C
出貨清單
- RealSense™景深攝影機D435if
- USB type C傳輸線
資料表
https://realsenseai.com/stereo-depth-with-ir-pass-filter/d435if/
相關商品


已售完
NT$ 40,000

已售完
Raspberry Pi 5
NT$ 1,000


NT$ 150
特價


Wio Terminal
原始價格:NT$ 1,300。NT$ 1,150目前價格:NT$ 1,150。

已售完
樹莓派 Raspberry Pi
NT$ 99,000